
Иван Посвенчук, изобретатель, доктор философии, профессор ПАКТ, награждён памятной медалью Героя Беларуси, академика К. С. Высоцкого.
«МОИ «ДВИГАТЕЛЬ» И «ДВИЖИТЕЛЬ» МОЖНО БУДЕТ ЭКСПЛУАТИРОВАТЬ В ВОЗДУШНОМ, ВОДНОМ, БЕЗВОЗДУШНОМ ПРОСТРАНСТВЕ, А ТАКЖЕ В СМЕШАННОМ РЕЖИМЕ БЕЗ ВНЕСЕНИЯ СУЩЕСТВЕННЫХ ИЗМЕНЕНИЙ В ИХ КОНСТРУКЦИЮ»
Изобретенные мной «Двигатель» и «Движитель » относятся к области энергетических установок.
В частности к двигателям, преобразующим вращательный поток газа в тяговое усилие; и может быть использован во многих отраслях народного хозяйства. Ведя собственные исследования, я разработал «Двигатель» и «Движитель», работа которых основана на нереактивных принципах. В результате упорного многолетнего труда, множества опытов, получил опытным путем эффект, основанный на вихревых потоках.
«Двигатель Посвенчука»
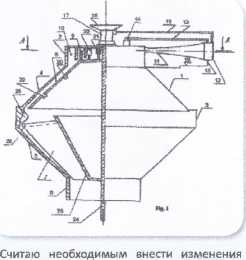
«Двигатель» включает выполненный в виде «тарелки» корпус с верхней и нижней цилиндрическими частями, снабженный усеченной конусной частью, расположенной между цилиндрическими частями. По касательной к внутренней образующей верхней цилиндрической части корпуса установлено сопло (например, сопло Лаваля) с камерой сгорания, внутренней конусной частью с внутренней цилиндрической частью. При этом внутренняя конусная часть снабжена механизмами для изменения положения относительно верхней конусной части, а также системой уплотнений и датчиками давления для измерения давления, расположенными на внутренней конусной части.
«Движитель Посвенчука»
В качестве привода «Движителя» может выступать любой тип двигателя. Эта и есть не что иное, как прорывная технология, о чем свидетельствуют выданные на нее многочисленные авторитетные патенты.
Перечень подтверждающих документов на изобретения и их описание
Заявка №2394787/23
Патент Российской Федерации N«2080469
Патент Республики Беларусь № 2477
Патент Республики Беларусь №2642
Патент Республики Беларусь № 8732
Патент Республики Беларусь N«14580
Патент Республики Беларусь №14718
Евразийский патент № 016275
Патент Республики Беларусь №16982
Параллельно опытным путём установлен эффект реверса тяги без изменения направления исходящего потока. Научного объяснения данному эффекту пока что нет. В ходе ведения дальнейших работ по совершенствованию конструкции, были созданы и испытаны новые образцы. Образец был построен на платформе, в качестве привода использовался двигатель от стиральной машины мощностью до 450 Ватт. Тяга, полученная при испытании образца, составила 0,5 кг.
В ходе дальнейших экспериментов с данной установкой был получен дополнительный эффект, при внесении в конструкцию дополнительных лопаток, тормозящих истекающий поток, тяга увеличилась, что пока также как бы противоречит законам реактивной механики. Тяга, полученная при испытании образца с тормозными лопатками, составила 0,8 кг.
Основываясь на полученном эффекте, была создана новая установка. Тяга, полученная при её испытании, составила 1,1 кг. Это превысило показатели самолётного винта в 2 раза (по такому показателю, как создание тяги на единицу затраченной мощности), определены условия, при которых будет превзойдён по этому же показателю и винт вертолёта.
Также был создан образец с применением двигателя внутреннего сгорания для демонстрации возможности создания автотракторной техники без деталей агрегатов трансмиссии.
Как известно, в реактивных аналогах тяга определяется формулой
t= m*v
где t- тяга,
m — массовый расход рабочего тела за 1 секунду,
v- скорость истекающего рабочего тела.
В нашем случае тяга определяется произведением давления на площадь усечённого конуса (тарелки). Само давление создаётся за счёт действия центробежной силы.
Fц = m*w2*r
где Fц-центробежная сила
m — масса,
w — угловая скорость, r — радиус вращения.
Учитывая, что угловая скорость центробежной силы в квадрате, на основании этих формул было предположено, что с увеличением скорости вращения тяга увеличится в квадрате (а в реактивных аналогах тяга будет увеличиваться пропорционально скорости). Учитывая также то, что энергозатраты для увеличения скорости в реактивных аналогах и в нашем случае приблизительно равны, делаем вывод: с увеличением скорости движения можно получать значительно больший эффект, чем в реактивных аналогах.
Для проверки этого предположения была создана опытная модель с возможностью изменения скорости вращения рабочих лопаток, а соответственно и скорости вращения.
В ходе испытаний ожидаемый эффект подтвердился:
при скорости вращения вала 2 000 об/мин — тяга 2,5 кг;
при скорости вращения вала 3 000 об/мин — тяга 6,5 кг.
Дальнейшее испытание с увеличением скорости не велось, так как установка разработана в экспериментальном варианте и без возможности обеспечения надлежащей техники безопасности.
Учитывая уникальность конструкции данного «Движителя», его эксплуатация может производиться в воздушном, водном и, возможно, безвоздушном пространствах, а также в смешанных режимах без внесения существенных изменений в конструкцию «Движителя».
Предполагаемые области применения «Движителя»:
Беспилотные (либо пилотируемые) летательные аппараты, передвигающиеся по воздуху, с возможностью погружения под воду, выхода в открытый космос.
Ранцевые вертолёты, спасательные платформы; платформы воздушного наблюдений и патрулирований.
Возможность создания автотракторной техники без применения трансмиссии. Надводные и подводные транспортные средства.
Манёвренные двигатели спутников.
Основываясь на полученных результатах, предлагаю всем заинтересованным принять участие в создании и испытании новейших образцов «Движителей» и «Двигателей», превосходящих по своим показателям реактивные аналоги, с последующим переходом на их промышленное производство и определение сфер использования.
Сообщаю, что сейчас я разрабатываю механизм, который позволит спутникам маневрировать на орбите, используя для этого солнечную энергию. Основанием для подобных утверждений является выявленная мной способность реверса тяги без изменения направления истекающего рабочего тела. До проведенных испытаний такое считалось невозможным.
Мои разработки основаны на решениях, которые пока противоречат основным Законам механики (имеются соответствующие заключения экспертов). Однако опыты доказали не только работоспособность этих механизмов, но и их преимущество перед существующими аналогами, что также подтверждают имеющиеся заключения экспертов.
Поэтому закон сохранения количества движения предлагается изложить в следующей редакции (ситуация где тяга создается силами нерезктивного происхождения):
В нереактивном движении количество движения, полученное телом (системой тел), прямо пропорционально количеству движения истекающего из тела (системы тел) рабочего тела, плюс прямо пропорционально действию импульса силы, действующего на тело (систему тел),
МV = МV + FT, где: М — масса тела (системы тел), V- Скорость тела (системы тел), М1 — масса отбрасываемых частиц из тела (системы тел), V1 скорость отбрасываемых частиц из тела (системы тел), FT — импульс силы действующий на тело (систему тел).
Предлагаю внести следующие понятия:
1. В нереактивном движении всякое тело (система тел) будет находиться в состоянии покоя или прямолинейного равномерного движения и может быть выведено из этого состояния под воздействием силы (сил), возникающих за счет внутренней энергии или энергии поступающей извне.
2. В нереактивном движении истекающий поток рабочего тела из механизмов можно затормозить, движение будет осуществляться за счет действия нереактивной составляющей, тяга при этом будет увеличиваться, а затраты энергии для создания тяги будут уменьшаться.
3. Сумма состоящая из количества движения, энергии и совершенной при этом работы, есть величина постоянная. И может быть выражена следующей формулой:
МV+-Э+А = const. Где: МУ — количество движения, Э — энергия, накопленная телом (системой тел), или энергия поступившая извне, А — работа, совершенная телом (системой тел).
Считаю необходимым внести изменения и дополнения в первый Закон Ньютона и изложить его в следующей редакции (вариант в силовых полях):
«Существуют такие системы отсчета, называемые инерциальными, относительно которых материальные точки (тела), когда на них не действуют никакие силы (или действуют силы взаимно уравновешенные), находятся в состоянии покоя или равномерного прямолинейного движения, могут быть выведенными из этого состояния силами, возникающими в силовом поле, а также в том случае, когда силовое пале создается за счет энергии накопленной телом или энергии поступившей извне, при условии если эти материальные точки (тела) способны реагировать на возникающее силовое поле, сила созданная в теле силовым полем зависит от местонахождения тела во вновь созданном силовом пале».
Мною также изобретен насос для перекачивания жидкостей, принципы работы которого отличаются от всех ныне существующих, где рабочий орган (поплавок) погружается в жидкость в созданном силовом поле.
Анализируя заложенный принцип работы настоящего насоса и с целью приведения принципа его работы в соответствие с изложенными Законами Механики, считаю необходимым внести изменения и дополнения в Закон Архимеда и изложить его в следующей редакции:
«На тело, погруженное в жидкость (или газ), действует выталкивающая сила, равная весу жидкости (или газа) в объеме тела, а в силовых полях путем наложения на данное тело дополнительного силового поля (за счет энергии накопленной телом или за счет энергии поступившей извне) и возникновения в этом поле дополнительной силы (сил), сумма сил в созданном силовом пале превзойдут по величине выталкивающую силу (при условии если указанное тело способно реагировать на созданное силовое поле), реагирование тела в силовом поле зависит и от местонахождения тела во вновь созданном силовом поле».
И определяется следующей формулой;
F= p*q* V – F где:
р — плотность жидкости (газа),
q — ускорение свободного падения,
V — объем погруженного тела (или часть объема тела, находящаяся ниже поверхности),
F — сила, созданная в теле силовым полем.